近日,由北京大學、北京通用人工智能研究院等單位組成的聯合科研團隊,開發出全球首個同時具備全手高分辨率觸覺感知和完整運動能力的機器人手系統——“基于全手觸覺的機器人仿生手”(簡稱F—TAC Hand),展示了我國在機器人前沿技術領域的創新能力,對推動機器人技術的自主創新和國產化具有重要意義。相關成果北京時間6月9日在國際頂級學術期刊《自然·機器智能》上發表。
手部既是人類改造自然與外界交互的重要器官,也是實現智能的關鍵載體。人的手部由27塊骨骼和34塊肌肉組成,提供了24個自由度的靈活性,具有結構高度復雜、功能極為精密等特點。因此,對人類手部功能的研究是具身智能與機器人研究的前沿。
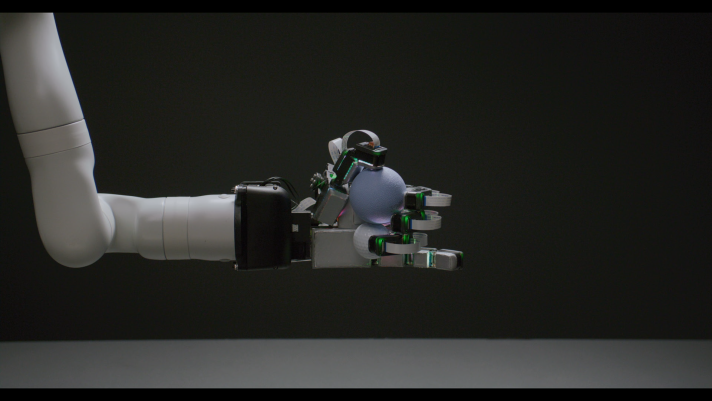
人的手部在拿取物體時涉及“觸覺反饋”與“運動功能”兩大能力。以往的研究中,觸覺反饋與運動能力的整合被認為是機器人研究領域中的關鍵挑戰之一。研究團隊通過傳感器與結構一體化設計,使F—TAC Hand在保持完整運動能力的前提下,實現了機器人手掌表面高分辨率觸覺覆蓋,使機器人能夠像人類一樣通過觸覺反饋進行精確操作和適應性抓取。
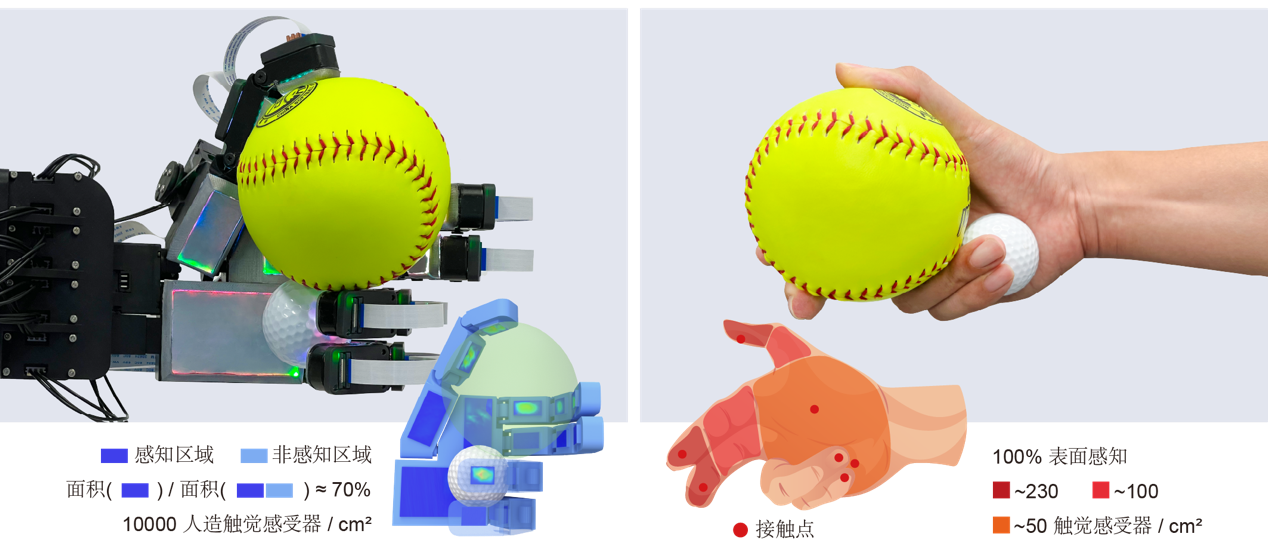
據介紹,高分辨率觸覺傳感器覆蓋手掌表面70%的區域,空間分辨率達到0.1毫米,相當于每平方厘米約有1萬個觸覺像素,遠超目前商用機器人手的觸覺感知能力。此外,F—TAC Hand還借鑒了人類手部的生物結構,將17個高分辨率觸覺傳感器以6種不同配置集成,使其像人類手掌一樣,在抓取過程中實時感知接觸變化并迅速調整,極大提升了機器人在不確定環境中的操作穩定性。此外,研究團隊還開發出生成人類多樣化抓取策略的算法,涵蓋了人類常見的19種抓取類型。
實驗結果表明,相比沒有觸覺反饋的系統,F—TAC Hand在面臨執行誤差和物體碰撞風險時表現出顯著的適應性優勢,平均成功率從53.5%提升至了100%。這項研究成果有望推動機器人技術在醫療、工業制造、特殊環境作業等領域的落地應用。論文通訊作者、北京大學人工智能研究院助理教授朱毅鑫表示:“未來,我們將繼續深化觸覺感知與機器人控制的結合,探索更加智能的體感交互范式,為實現真正意義上的通用人工智能奠定基礎。”
來源 人民日報客戶端
編輯 胡桅可
二審 楊韜
三審 劉丹
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



