蔚來輔助駕駛,一夜逆襲了?
小長假期間,蔚來悄悄上線了世界模型蔚來NWM(NIO World Model),落地了「車位到車位」,引發了一些車主好評,也有一些車主吐槽。
帶著上述疑問,智能車參考開著一輛老款ES6,從北京四環開到二環再返回,途經孔廟、水立方、西直門,場景覆蓋環島、立交橋、人流較大的景點等等,一句話總結實測感受就是:
有驚喜,有驚訝,還有一點點小驚嚇。
實測蔚來NWM世界模型
首先是驚訝,蔚來NWM很有“端味兒”,輔助駕駛時會做出一些不提倡,但大多數司機開車時都會有的行為,比如連續變道和闖黃燈,而且NWM和斌哥一樣是個老實人,闖完黃燈還會自己主動說出來,顯示在屏幕上:

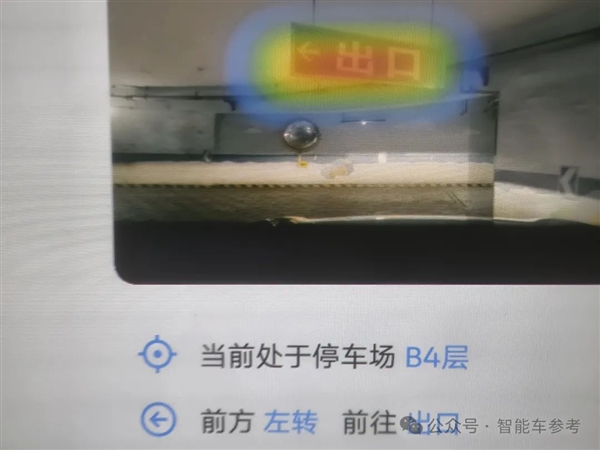
然后是驚喜,蔚來NWM實現了「車位到車位」,在停車場內部實測時,NWM能夠從地下4層停車場自己開到閘機口,雖然這是目前頭部玩家都已落地的功能,但是NWM的獨特之處在于,它是利用純模型實現的。

不需要掃圖上云,也不需要記憶路線,你只需要給NOMI(蔚來的AI助手)說一句,“開出停車場”:

車輛就會自己主動感知:

通過識別停車場內部的標識, 包括樓層號、箭頭指向、出口標志等。
這樣的好處是,用戶在第一次去的停車場里就能用輔助駕駛,比較方便。
最后,整個實測過程中,還有一點點小驚嚇。
首個版本的風格比較激進,在路口起步提速和變道都比較果斷,在個別路口準備轉向時,距離非機動車稍微有一點近。智能手表的監測結果顯示,(膽小)主駕開車時最高心率來到了128。

具體到一些場景上,有些地方表現得不錯,比如一路上遇到多個環島:應對得還不錯。
還有無保護左轉:

遇到施工現場,也能及時發現然后并到正常道路:

也能識別部分公交車道:

不過目前有一些場景處理得還不是很好,比如說掉頭,偶爾會壓實線,個別公交車道識別不到:

智能車參考這次還體驗了“隨心停”功能,在屏幕上拖拽方框,真的是想咋停就咋停,不管地面上有沒有劃線。
綜合體驗下來,蔚來NWM首個版本亮點突出,但也不是十全十美。
也提醒各位車主,目前還都是輔助駕駛,無論是蔚來已經啟用的世界模型,還是其他哪家的˙輔助駕駛系統,都要看好路況,準備好隨時接管。
有一點要點贊的是,近兩年行業喜歡將最新系統同步最新車型上市,為新車銷量護航,而蔚來這次優先給老車主推送了新系統,稱得上是一股清流。

新款車主也不要著急,已發布的新款“5566”都搭載了蔚來自研的神璣芯片,自家硬件更知根知底,軟件優化帶來的體驗上限也會更高。
不過產品體驗之外,如果你也好奇背后的原理,咱還得從背后的技術說起。
世界模型是什么?為什么蔚來選擇了這條路線?
為什么是世界模型?
端到端在2024年一統輔助駕駛江湖,成為年度TOP1的熱詞,但在蔚來看來,端到端缺乏對空間和時間的理解能力,而此前火熱的占用網絡對空間的理解能力也有待加強,對細小物體,比如閘機的抬桿識別能力不夠。
蔚來希望能構建一個模型,就像人的大腦一樣,具備時間推演和空間想象能力,于是就有了蔚來NWM世界模型。輸入一個真實世界的行車視頻,能夠推演出“多個平行世界”。

模型會根據輸入的外界信息,在極短暫的時間內生成多個軌跡,評估后選出最好的,車輛不斷往前開,不斷同步生成多個軌跡,然后從中不斷評估和選擇。
蔚來認為,相比常規的端到端,NWM世界模型的空間理解更好,數據也無需人工標注,想象的視頻時序也更長。
實際上,世界模型并非新鮮事物。據介紹在機器學習領域已有30年的歷史,Robotaxi玩家比如Waymo、蘿卜快跑和小馬智行大概在5年前就開始應用,但隨著大模型和端到端打開了AI應用上限,世界模型的思路開始被更多玩家實踐。

比如華為和小鵬,在不久前的上海車展時期就發布了相關規劃,有不同的應用思考。Momenta雖然沒有直接提及,但是透露下一代模型會基于強化學習打造。
世界模型就是基于強化學習的范式,將其類比人類的學習方式就是,老師不會直接給學生演示怎么做,而是給學生創造一個環境,讓學生自己去摸索。
AI大牛任少卿則用了更直接的類比,當我們想象一個交通場景,大腦會推演不同情景然后做出決策,這實際就是世界模型工作的機制和原理。
任少卿是深度學習算法ResNet的作者之一,參與了深度學習主導的AI復興浪潮。
而現在,蔚來世界模型NWM,就是他最新的帶隊實踐。
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



